

Risk-averse ensemble control: why "average" performance is no longer good enough
May 2026
Research
Read more
A number of modern applications of optimal control require researchers to view the underlying system as an ensemble of parametric systems. In other words, the challenge of ensemble control arises from the need to steer a diverse family of random systems using a single, broadcast control signal without the ability to immediately adapt to observations of the system.
This framework is vital to several cutting-edge fields. One area of machine learning uses so-called neural ordinary differential equations (Neural ODEs) as a means of modeling continuous-time systems, handling irregularly sampled time-series data, and improving memory efficiency in deep learning. Neural ODEs represent infinitely deep neural networks. Here, training a shared set of network weights must simultaneously guide an ensemble of trajectories generated by underlying data. Similarly, in quantum computing, we need to design single electromagnetic pulses that must robustly steer a physical ensemble of quantum states.
Because these systems are subject to parametric uncertainty (like varying data inputs or inhomogeneous resonance frequencies), the standard mathematical approach is to optimize the expected value of functions of the system's inherently random state. While this "risk-neutral" strategy is computationally friendly and performs well on average, it has a structural blind spot: it fails to penalize variance or protect against worst-case outliers.
In our recently submitted paper, "Risk-Averse Ensemble Control for Control-Affine Systems," we propose a mathematical framework that moves beyond the average, allowing researchers to systematically hedge against unfavorable outcomes in complex systems.
Examples of hidden topological structure and process over it. (Left) In neural pathways, the underlying anatomical edge structure is known, but the combined firing of neurons across distinct regions constitutes a hidden topological process that needs to be inferred from external brain measurements. (Right) In dense wireless networks, the mobility and physical placement of devices generate hidden electromagnetic interference patterns. These latent multi-way interactions are observed indirectly through localised metrics such as Signal-to-Noise Ratio (SNR) and packet loss at the individual devices
What’s wrong with performing our best on average?
There are many ways to set up optimal control problems when the data are subject to random phenomena. Aside from the —least robust— strategy of replacing any random quantities by their expectations, the traditional approach in stochastic programming is to view the loss or objective as a random quantity itself and then take its expectation. When an optimization problem relies strictly on the expected value of the objective, the resulting control signal will likely succeed for the bulk of the ensemble. However, while such a control signal would perform well upon repeated application —assuming the data distribution does not change— it permits arbitrarily large failures in scenarios arising from the "tails" of the parameter distribution.
In precision engineering and safety-critical AI, this is a significant vulnerability. If a broadcast pulse in a quantum computer is optimized merely for the "average" qubit, it leaves the system prone to high error rates on physical outliers. Achieving true reliability requires us to bridge the gap between optimizing for the mean and guaranteeing strict, uniform performance across the board.
A risk-averse mathematical framework
To address these issues, mathematicians use a wide array of tools—known as risk measures—to express risk aversion and account for outlier events and tail behavior. These ideas have been around for decades in computational management science, especially in financial planning and logistics. However, much less has been published regarding optimal control problems, despite the growing number of interesting applications.
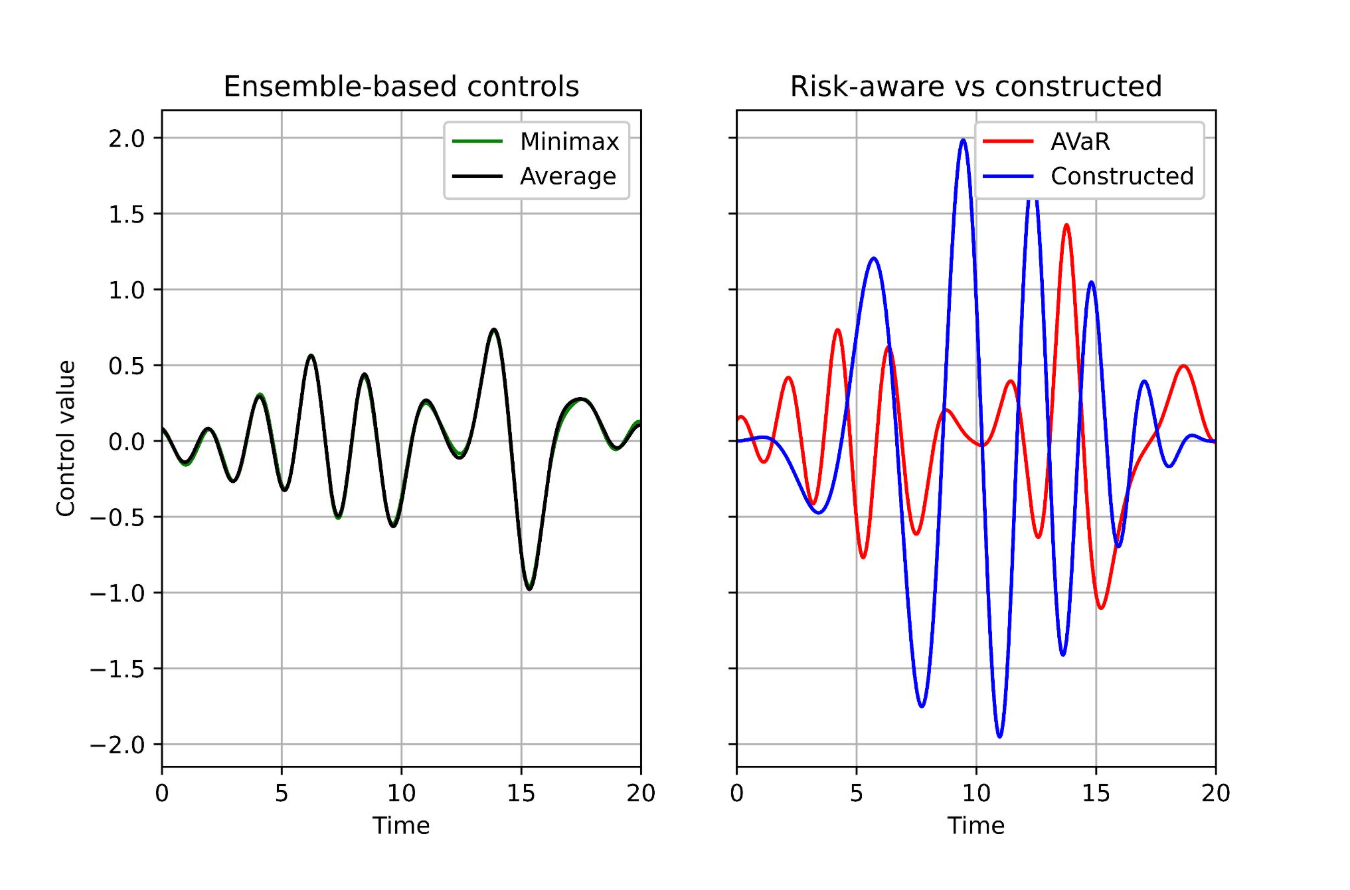
Some of these risk measures have perhaps familiar names: standard deviation, semi-deviation, or value-at-risk. In our work, we make use of the Average Value-at-Risk (AVaR), also known as expected shortfall, tail value-at-risk, superquantile, and conditional value-at-risk.
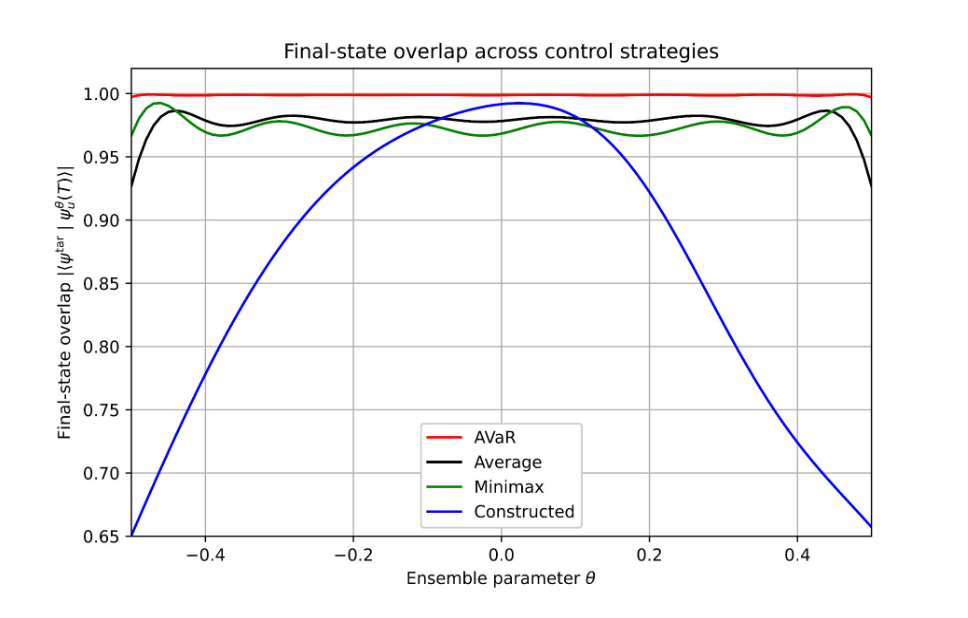
Metaphorically, the confidence level parameter in AVaR—a real number between 0 and 1—acts as a tunable dial. By adjusting the confidence level, we can systematically interpolate between standard average performance and strict worst-case bounds. By evaluating the control action against the highest-impact outlier scenarios, the risk-averse framework provides robust stability without becoming so conservative that it ignores favorable outcomes.
Transitioning from risk-neutral to risk-averse optimization introduces significant mathematical complexities, particularly due to the "non-smooth" nature of these risk objectives. A major contribution of our paper is providing the rigorous topological proofs required for control-affine systems. By formally characterizing the control-to-state mapping, we establish the analytical foundation needed to guarantee that modern, infinite-dimensional optimization algorithms can actually converge on these robust solutions.
Conclusion
As artificial intelligence and complex engineering systems become deeply integrated into society, relying solely on expected value is no longer sufficient. We cannot settle for AI models or quantum technologies that perform well under normal conditions but fail unpredictably on the margins. By establishing a rigorous analytical foundation for risk-averse ensemble control, we provide a mathematical pathway to design control inputs that offer uniform, provable guarantees.
This work directly advances the core mission of the SURE-AI Centre: developing Sustainable, Risk-Averse, and Ethical AI. True ethical and reliable AI requires systems that are robust by design, systematically protecting against worst-case scenarios rather than simply hoping they do not occur. By embedding risk measures directly into the mathematical foundation of our control algorithms, we are taking a necessary step toward building intelligent systems that we can trust in an inherently uncertain world.
Authors:
- Alessandro Scagliotti (CIT School, Technical University of Munich, Garching bei München, Germany & Munich Center for Machine Learning (MCML), Munich, Germany)
- Thomas M. Surowiec (Simula Research Laboratory, Oslo, Norway & SURE-AI Centre for Sustainable, Risk-Averse and Ethical AI, Oslo, Norway)
Note: The drafting and editing of this blog post were assisted by Google's Gemini.
Keep reading

Tracking the unseen: how topological Kalman filters reveal hidden network dynamics
May 2026
Research
Read more
Double-click to select video

Unifying Risk and Belief: A Foundation for Coherent AI Decision-Making
October 2025
Research
Read more
Double-click to select video
En annen sak med en tittel som dette
September 2025
News
Read more
The economics of overlapping generations: a stochastic lens
October 2025
Research
Read more
Toward trustworthy AI: recovering reliable decisions from corrupted and uncertain data
May 2026
Research
Read more
Risk-averse ensamble control: why "average" performance is no longer good enough
May 2026
Research
Read more
Double-click to select video

The Geometry of Data - Why Machine Learning Needs Signatures
February 2025
Research
Read more
Double-click to select video

SURE-AI kicks off: “of vital importance to our future”
December 2025
News
Read more

Beyond the Monolith: How Brain-Inspired AI is Building a More Reliable and Sustainable Future
November 2025
Research
Read more

Signals with shape: why topology matters for modern data?
November 2025
Research
Read more

Why horizon matters more than you think in decision making
November 2025
Research
Read more
Double-click to select video

The economics of overlapping generations: a stochastic lens
October 2025
Research
Read more
Double-click to select video
Unifying Risk and Belief: A Foundation for Coherent AI Decision-Making
October 2025
Research
Read more